Map-Free Outdoor Social Navigation
Translating high-level human intent into safe, long-horizon, socially compliant outdoor robot navigation.
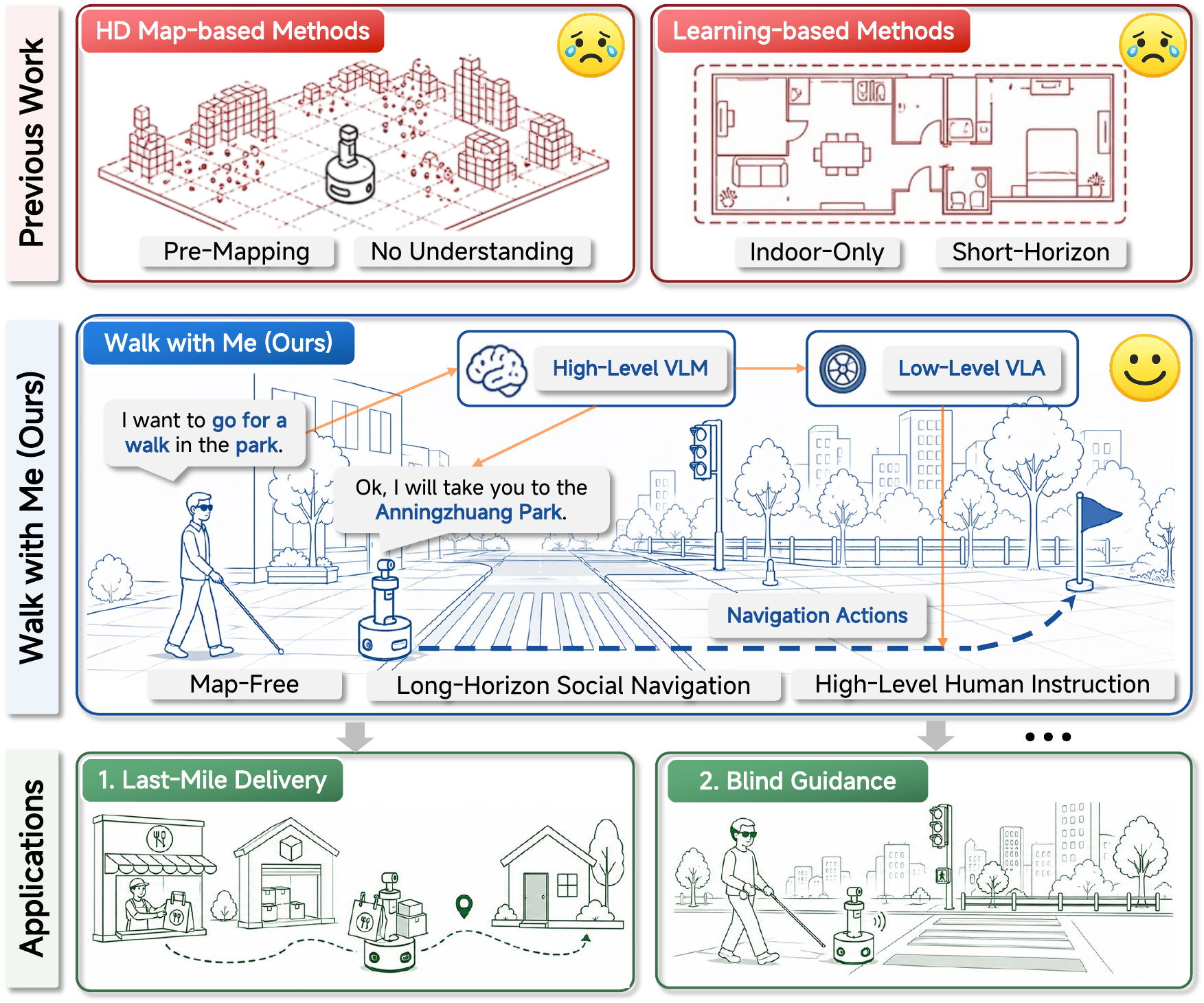
Assisting humans in open-world outdoor environments requires a robot to translate high-level natural-language intentions into safe, long-horizon, and socially compliant navigation behavior. Walk With Me is a map-free framework for this setting. Instead of relying on costly pre-built HD maps, it uses GPS context and lightweight candidate points-of-interest from public map services for semantic destination grounding and waypoint proposal.
A High-Level Vision-Language Model grounds the user's abstract instruction into a concrete destination and plans a coarse waypoint sequence. During execution, an observation-aware router decides whether a situation can be handled by the Low-Level Vision-Language-Action policy or should be escalated back to the High-Level VLM for explicit safety reasoning. Routine segments are executed by the Low-Level VLA, while complex scenes such as crowded crossings trigger stop-and-wait behavior when unsafe.
Representative outdoor runs for last-mile delivery and blind guidance.
The robot grounds "Take the milk tea to Building B" into a concrete destination and follows a long-horizon route while avoiding nearby pedestrians.
The system maps an open-ended walking request to a nearby destination, reasons about road-crossing safety, and continues with socially aware navigation.
The framework decouples where to go from how to walk there.
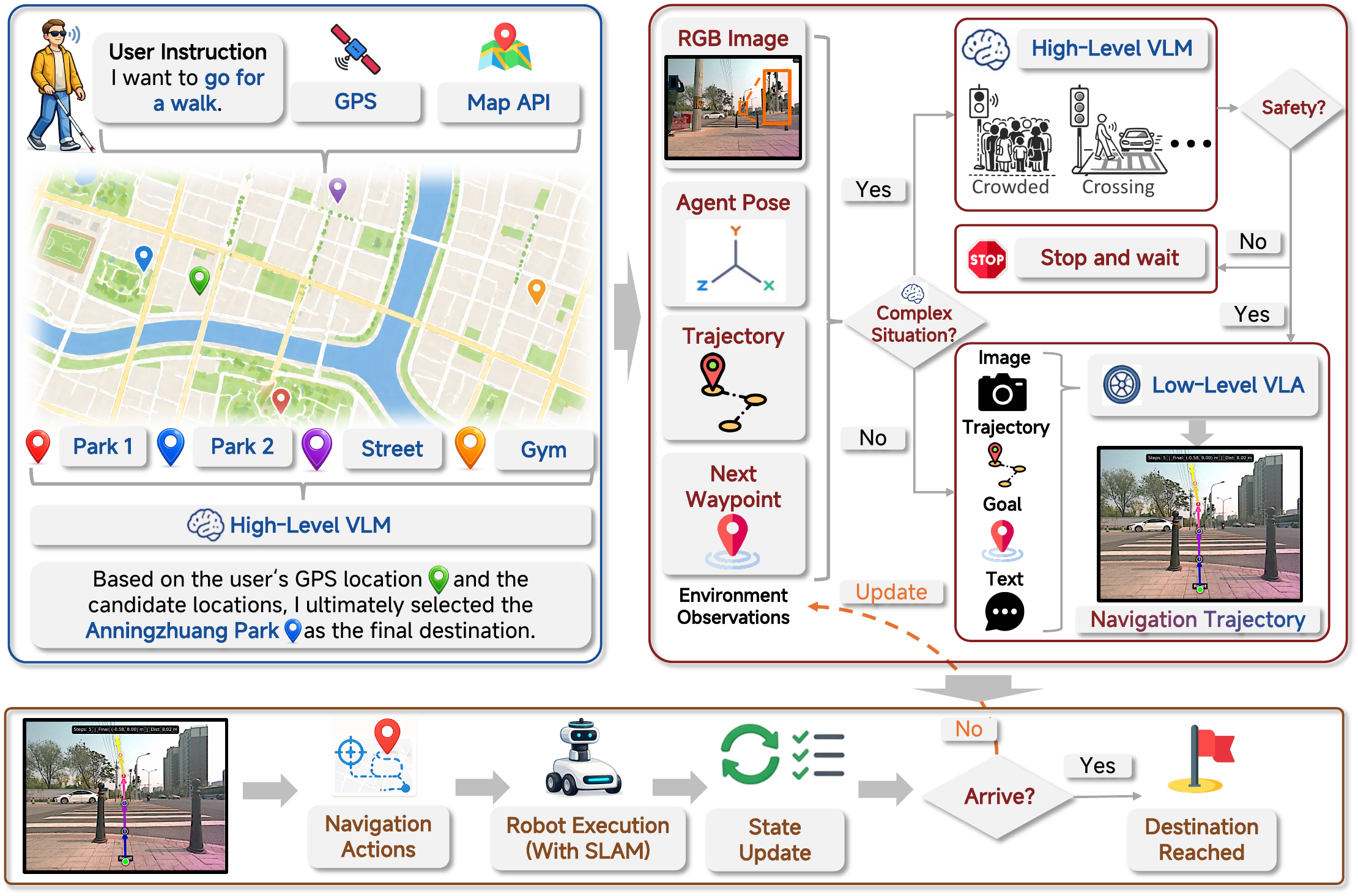
A High-Level VLM interprets the user instruction with GPS context and nearby POI candidates, selecting a concrete real-world destination.
Public walking-route services provide lightweight route priors that are resampled into geo-referenced waypoints without requiring an HD map.
An observation-aware router sends routine segments to a Low-Level VLA and escalates crossings, crowds, or ambiguous traffic to high-level safety reasoning.
The robot predicts local navigation actions, updates its state, and repeats the loop until the destination is reached.
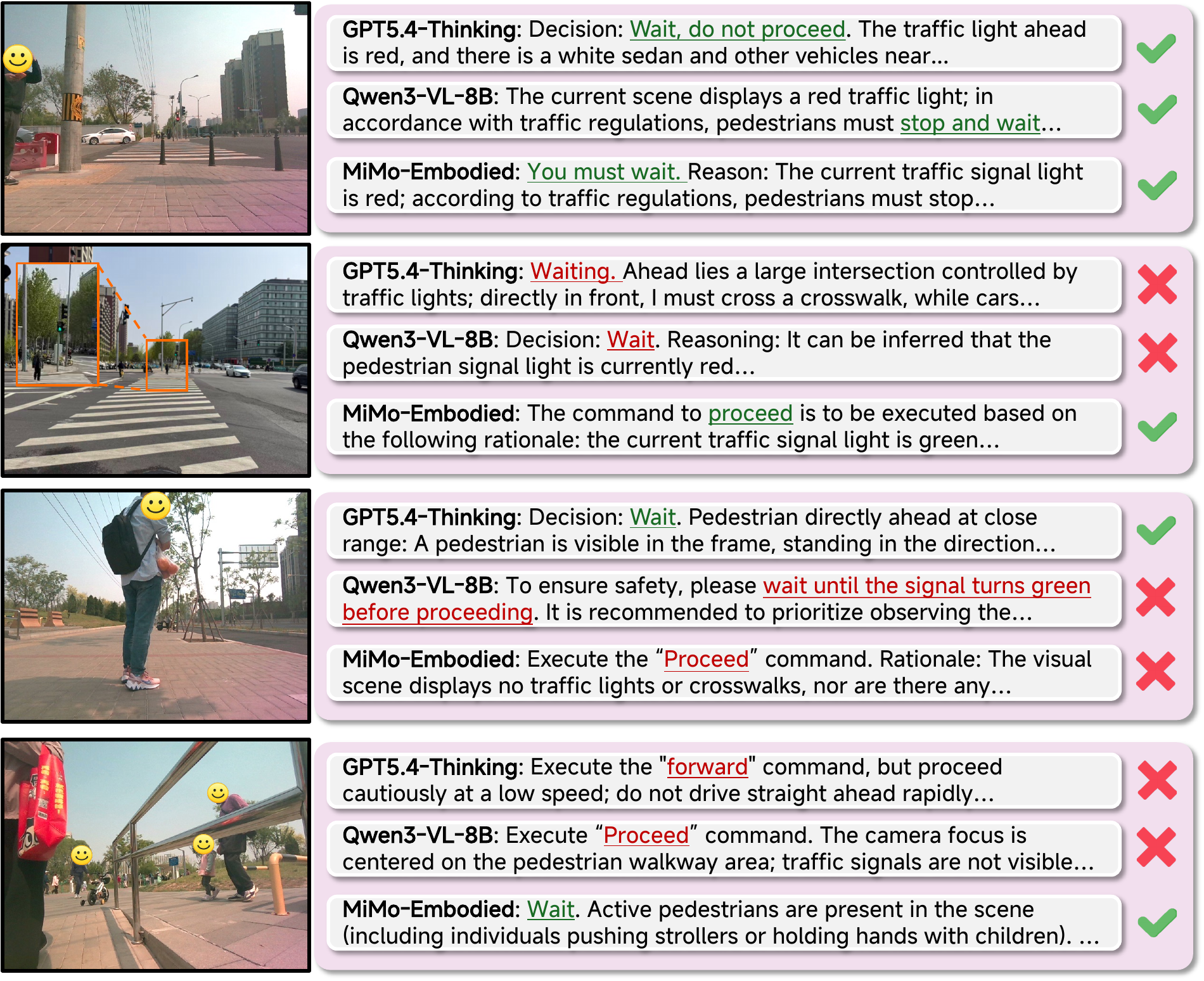
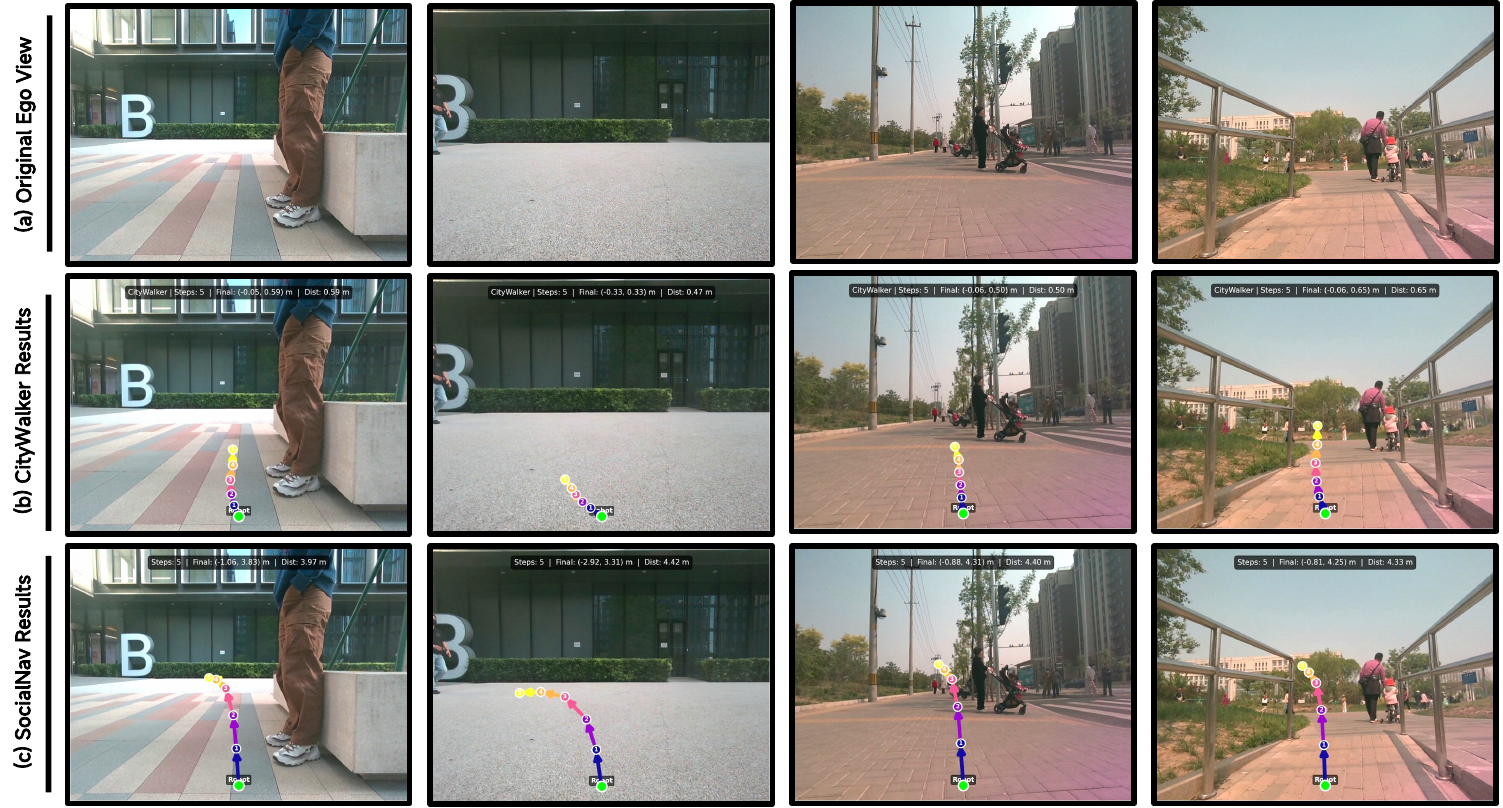
Real-world examples and model behaviors from the updated paper.

Walk With Me targets practical outdoor assistance where the user gives natural, high-level requests.
Completes long-horizon outdoor delivery routes with social compliance and local obstacle awareness.
Uses explicit safety reasoning at crossings and crowded scenes before proceeding.
@article{zhang2026walkwithme,
title={Walk With Me: Long-Horizon Social Navigation for Human-Centric Outdoor Assistance},
author={Zhang, Lingfeng and Hao, Xiaoshuai and Bu, Xizhou and Tang, Yingbo and Li, Hongsheng and Lu, Jinghui and Wei, Xiu-shen and Ma, Jiayi and Liu, Yu and Zhang, Jing and Ye, Hangjun and Liang, Xiaojun and Chen, Long and Ding, Wenbo},
journal={Preprint},
year={2026}
}